- Электроактивные полимеры
-
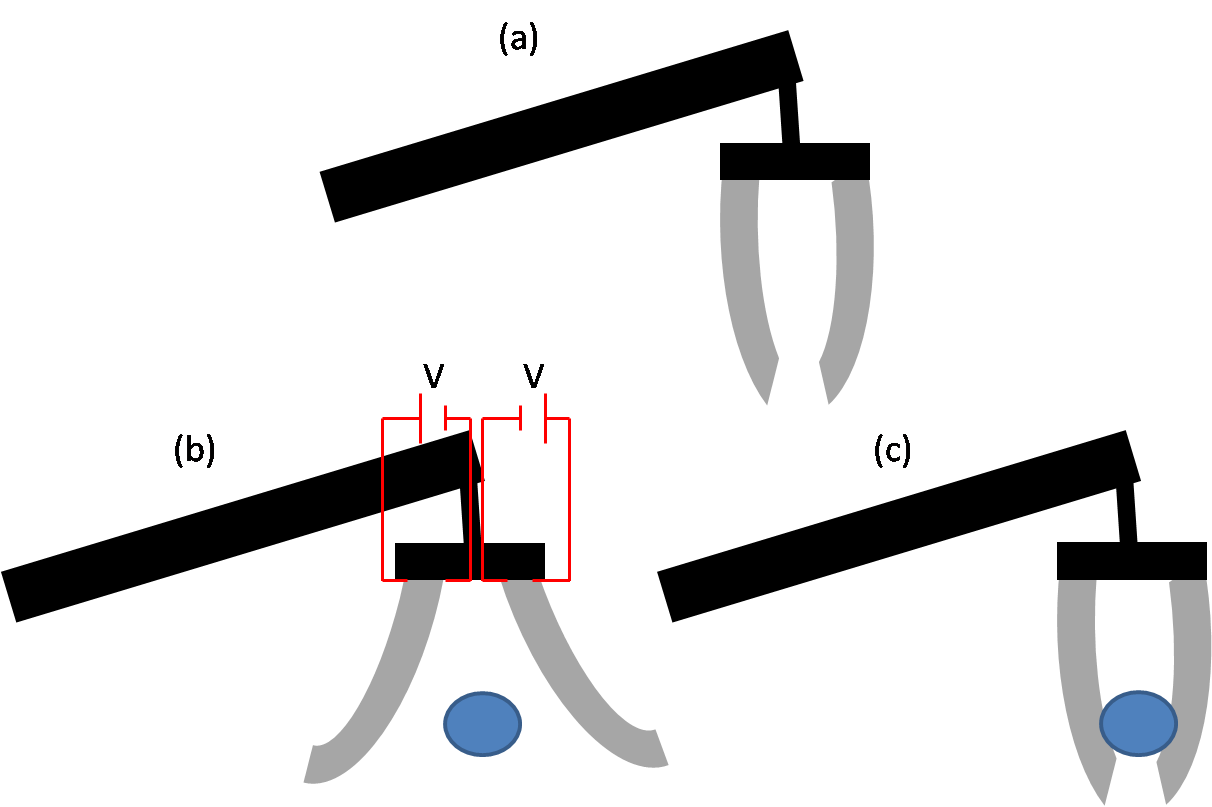
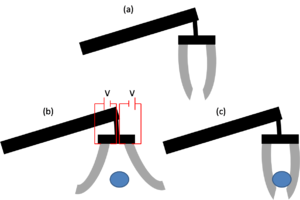 Принцип работы ЭАП схвата. (b) При приложении напряжения ЭАП пластины расходятся и схват можно подвести к объекту. (c) При снятии напряжения ЭАП пластины принимают первоначальную форму и удерживают объект
Принцип работы ЭАП схвата. (b) При приложении напряжения ЭАП пластины расходятся и схват можно подвести к объекту. (c) При снятии напряжения ЭАП пластины принимают первоначальную форму и удерживают объект
Электроактивные полимеры (ЭАП) — полимеры, изменяющие форму при приложении к ним электрического напряжения. Они могут использоваться как двигатели, так и как сенсоры. В качестве двигателей они могут значительно деформироваться, в то же время развивая значительное усилие.
Благодаря схожести с живыми мускулами по развиваемым усилиям, их часто называют искусственными мышцами. Электроактивные полимеры используются в робототехнике в качестве линейных приводов.
Классификация
ЭАП можно разделить на два класса:
- Диэлектрические ЭАП (Диэлектрические эластормеры) — в них усилие возникает в результате электростатических сил возникающих между электродами сжимающими полимер. Диэлектрические эластормеры способны выдерживать очень высокие напряжения и фактически представляют собой конденсатор, который изменяет свою емкость, при приложении электрического напряжения, позволяя полимеру утончаться, увеличивая при этом площадь под действием электрического поля. Этот тип ЭАП требует высокой напряжённости электрического поля (и соответственно высокого напряжения — сотни и даже тысячи вольт), однако отличаются низким энергопотреблением. Диэлектрические ЭАП не потребляют энергию для сохранения заданного положения.
- Ионные ЭАП, в которых усилие возникает из-за смещения ионов в полимере. Рабочие напряжения ионных ЭАП — единицы вольт, но необходимость поддержания потока ионов приводит к большему энергопотреблению, кроме того, для поддержания заданного положения необходим постоянный расход энергии.
См. также
Ссылки
- Список публикаций посвященных электроактивным полимерам, преимущественно на английском языке
- Популярная статья об ЭАП на сайте membrana.ru
 Категории:
Категории:- Полимеры
- Робототехника
Wikimedia Foundation. 2010.