- Робототехника
-
 Рука робота
Рука робота
Робототе́хника (от робот и техника; англ. robotics) — прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Робототехника опирается на такие дисциплины как электроника, механика, программирование. Выделяют строительную, промышленную, бытовую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.
Содержание
Этимология
Слово «робототехника» было впервые использовано в печати Айзеком Азимовым в научно-фантастическом рассказе «Лжец», опубликованном в 1941 г.
«Робототехника» базируется на слове «робот», придуманном в 1920 г. научным фантастом и Нобелевским лауреатом Карелом Чапеком для своей пьесы Р. У. Р.. Однако интерес к идеям, схожим с робототехникой, наблюдался ещё до введения этого термина:
- В «Илиаде» Гефест сделал говорящих служанок из золота.
- Архиту Тарентскому приписывают создание механического голубя в 400 г. до н. э.
Компоненты роботов
Приводы
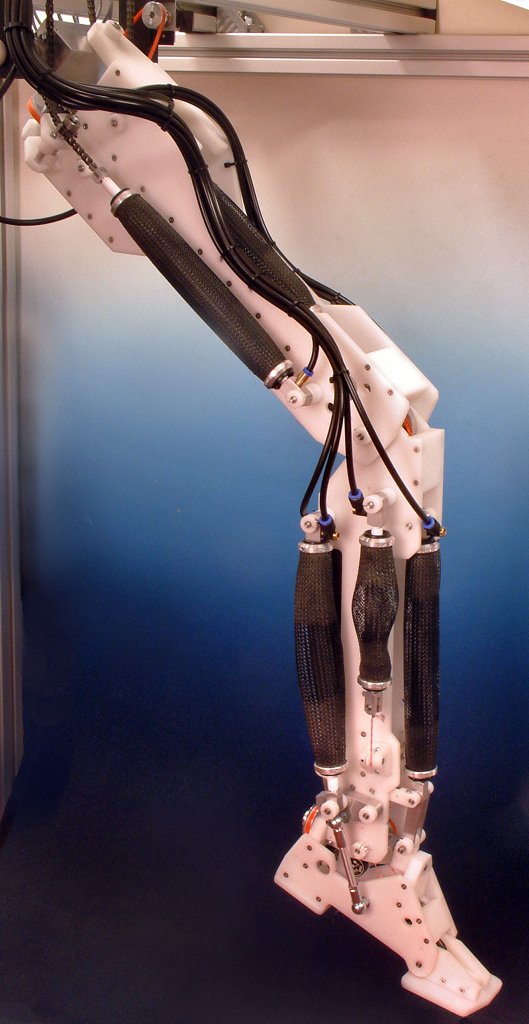
 Нога робота, работающая на воздушных мышцах.
Нога робота, работающая на воздушных мышцах.Приводы — это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются электрические, но применяются и другие, использующие химические вещества или сжатый воздух.
- Двигатели постоянного тока: В настоящий момент большинство роботов используют электродвигатели, которые могут быть нескольких видов.
- Шаговые электродвигатели: Как можно предположить из названия, шаговые электродвигатели не вращаются свободно, подобно двигателям постоянного тока. Они поворачиваются пошагово на определенный угол под управлением контроллера. Это позволяет обойтись без датчика положения, так как контроллеру точно известно, на сколько был сделан поворот. В связи с этим они часто используются в приводах многих роботов и станках с ЧПУ.
- Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные как ультразвуковые двигатели. Принцип их работы совершенно отличается: крошечные пьезоэлектрические ножки, вибрирующие с частотой более 1000 раз в секунду, заставляют мотор двигаться по окружности или прямой. Преимуществами подобных двигателей являются высокое нанометрическое разрешение, скорость и мощность, несоизмеримая с их размерами. Пьезодвигатели уже доступны на коммерческой основе и также применяются на некоторых роботах.
- Воздушные мышцы: Воздушные мышцы — простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом, мышцы способны сокращаться до 40 % от своей длины. Причиной такого поведения является плетение, видимое с внешней стороны, которое заставляет мышцы быть или длинными и тонкими, или короткими и толстыми. Так как способ их работы схож с биологическими мышцами, их можно использовать для производства роботов с мышцами и скелетом, аналогичными мышцам и скелету животных.[1][2]
- Электроактивные полимеры: Электроактивные полимеры — это вид пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут быть сконструированы таким образом, что могут гнуться, растягиваться или сокращаться. Однако, в настоящее время нет ЭАП, пригодных для производства коммерческих роботов, так как все неэффективны или непрочны.
- Эластичные нанотрубки: Это многообещающая экспериментальная технология, находящаяся на ранней стадии разработки. Отсутствие дефектов в нанотрубках позволяет этому волокну эластично деформироваться на несколько процентов. Человеческий бицепс может быть заменен проводом из такого материала диаметром 8 мм. Такие компактные «мышцы» могут помочь роботам в будущем обгонять и перепрыгивать человека.
Способы перемещения
Колёсные и гусеничные роботы
Наиболее распространёнными являются четырёхколёсные и гусеничные роботы. Также создаются роботы, имеющие другое число колёс — два или одно. Такого рода решения позволяют упростить конструкцию робота, а также придать роботу возможность работать в пространствах, где четырёхколёсная конструкция оказывается неработоспособна.
Двухколёсные роботы, как правило, используют гироскоп, для определения угла наклона корпуса робота и выработки управляющего напряжения для приводов робота с целью удержать равновесие и совершать необходимые перемещения. Задача удержания равновесия двухколёсного робота связана с динамикой обратного маятника[3]. На данный момент, разработано множество подобных «балансирующих» устройств[4]. К таким устройствам можно отнести Сегвей, который может быть использован, как компонент робота; так например сегвей использован как транспортная платформа в разработанном НАСА роботе Робонавт[5].
Одноколёсные роботы во многом представляют собой развитие идей, связанных с двухколёсными роботами. Для перемещения в 2D пространстве в качестве единственного колеса может использоваться шар, приводимый во вращение несколькими приводами. Несколько разработок подобных роботов уже существуют. Примерами могут служить шаробот разработанный в университете Карнеги — Меллона, шаробот «BallIP», разработанный в университете Тохоку Гакуин (англ. Tohoku Gakuin University)[6], или шаробот Rezero[7], разработанный в Швейцарской высшей технической школе. Роботы такого типа имеют некоторые преимущества, связанные с их вытянутой формой, которые могут позволить им лучше интегрироваться в человеческое окружение, чем это возможно для роботов некоторых других типов[8].
Существует некоторое количество прототипов сферических роботов. Некоторые из них для организации перемещения используют вращение внутренней массы[9][10][11][12]. Роботов подобного типа называют англ. spherical orb robots, англ. orb bot[13] и англ. ball bot[14][15].
Для перемещения по неровным поверхностям, траве и каменистой местности разрабатываются шестиколёсные роботы, которые имеют большее сцепление, по сравнению с четырёхколёсными. Ещё большее сцепление обеспечивают гусеницы. Многие современные боевые роботы, а также роботы, предназначенные для перемещения по грубым поверхностям разрабатываются как гусеничные. Вместе с тем, затруднено использование подобных роботов в помещениях, на гладких покрытиях и коврах. Примерами подобных роботов могут служить разработанный НАСА робот англ. Urban Robot («Urbie»)[16], разработанные компанией iRobot роботы Warrior и PackBot.
Шагающие роботы
Перемещение робота с использованием «ног» представляет собой сложную задачу динамики. Уже создано некоторое количество роботов перемещающихся на двух ногах, но эти роботы пока не могут достичь такого устойчивого движения, какое присуще человеку. Так же, создано множество механизмов, перемещающихся на более чем двух конечностях. Внимание к подобным конструкциям обусловлено тем, что они легче в проектировании[17][18]. Предлагаются так же гибридные варианты (как, например, роботы из фильма «Я, робот», способные перемещаться на двух конечностях во время ходьбы и на четырёх конечностях во время бега). Роботы, использующие две ноги, как правило хорошо перемещаются по полу, а некоторые конструкции могут перемещаться по лестнице. Перемещение по пересечённой местности является сложной задачей для роботов такого типа. Существует ряд технологий позволяющих перемещаться шагающим роботам:
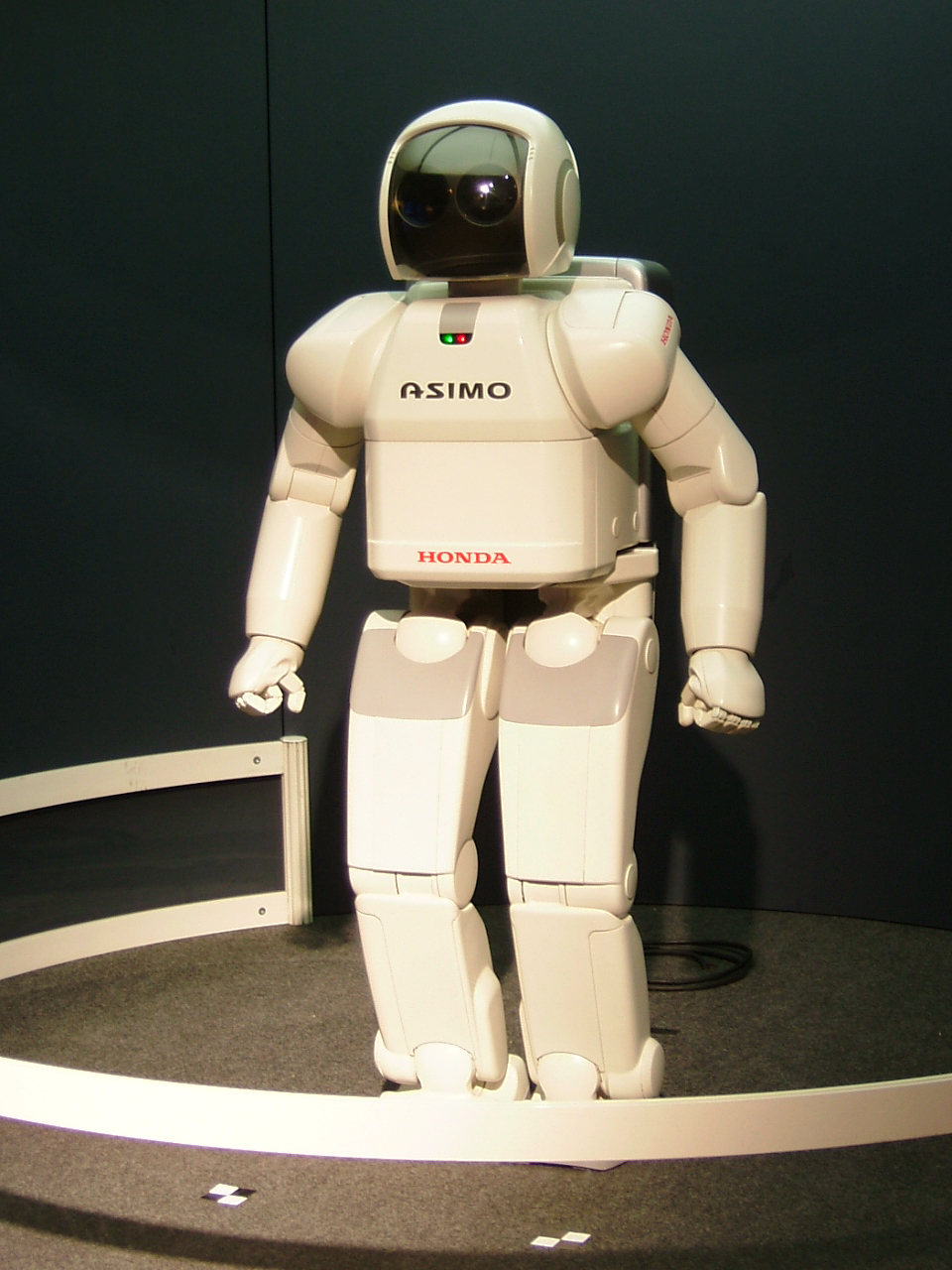
- ZMP-технология: ZMP (англ.) (англ. Zero Moment Point, «точка нулевого момента») — алгоритм, использующийся в роботах, подобных ASIMO компании Хонда. Бортовой компьютер управляет роботом таким образом, чтобы сумма всех внешних сил, действующих на робота была направлена в сторону поверхности, по которой перемещается робот. Благодаря этому не создаётся крутящего момента, который мог бы стать причиной падения робота[19]. Подобный способ движения не характерен для человека, в чем можно убедиться сравнив манеру перемещения робота ASIMO и человека[20][21][22].
- Прыгающие роботы: в 1980-х годах профессором Марком Рейбертом (англ. Marc Raibert из англ. «Leg Laboratory» Массачусетского технологического института был разработан робот, способный сохранять равновесие посредством прыжков, используя только одну ногу. Движения робота напоминают движения человека на тренажёре пого-стик[23]. Впоследствии алгоритм был расширен на механизмы, использующие две и четыре ноги. Подобные роботы продемонстрировали способности к бегу и способность выполнять сальто[24]. Роботы, перемещающие на четырёх конечностях, продемонстрировали бег, перемещение рысью, аллюром, скачками[25].
- Адаптивные алгоритмы поддержания равновесия. В основном базируются на расчете отклонений мгновенного положения центра масс робота от статически устойчивого положения или некоей наперед заданной траектории его движения. В частности, подобную технологию использует шагающий робот-носильщик Big Dog. При движении этот робот поддерживает постоянным отклонение текущего положения центра масс от точки статической устойчивости, что влечет необходимость своеобразной постановки ног («коленки внутрь» или «тянитолкай»), а также создает проблемы с остановкой машины на одном месте и отработкой переходных режимов ходьбы. Адаптивный алгоритм поддержания устойчивости также может базироваться на сохранении постоянного направления вектора скорости центра масс системы, однако подобные методики оказываются эффективными только на достаточно высоких скоростях. Наибольший интерес для современной робототехники представляет разработка комбинированных методик поддержания устойчивости, сочетающих расчет кинематических характеристик системы с высокоэффективными методами вероятностного и эвристического анализа.
Другие методы перемещения
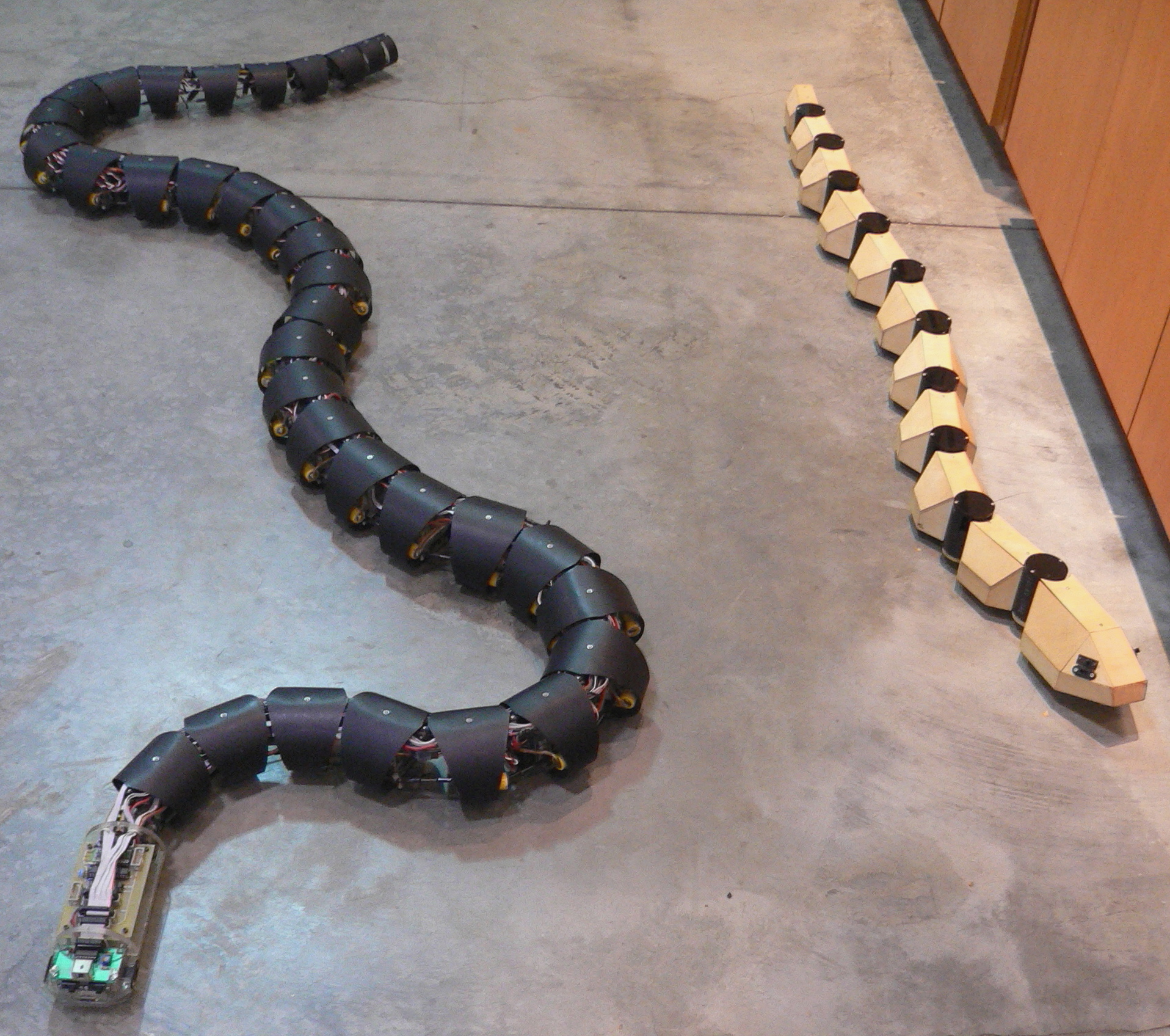
 Два змееподобных робота. Левый оснащен 64-мя приводами, правый десятью.
Два змееподобных робота. Левый оснащен 64-мя приводами, правый десятью.- Летающие роботы. Большинство современных самолётов являются летающими роботами управляемыми пилотами. Автопилот способен контролировать полёт на всех стадиях — включая взлёт и посадку[26]. Также к летающим роботам относятся беспилотные летательные аппараты (БПЛА). Подобные аппараты имеют меньший вес, за счет отсутствия пилота, и могут выполнять опасные миссии. Некоторые БПЛА способны вести огонь по команде оператора. Так же разрабатываются БПЛА, способные вести огонь автоматически. К БПЛА так же относятся крылатые ракеты. Кроме метода движения, используемого самолётами, летающими роботами используются и другие методы движения, например, подобные тем, что используют пингвины, скаты, медузы — такой способ перемещения используют роботы Air Penguin[27][28], Air Ray[29] и Air Jelly[30] компании Festo.
- Змееподобные роботы. Существует ряд разработок роботов, перемещающихся подобно змеям. Предполагается, что подобный способ перемещения может придать им возможность перемещаться в узких пространствах; в том числе предполагается использовать подобных роботов для поиска людей под обломками рухнувших зданий[31]. Так же, разработаны змееподобные роботы, способные перемещаться в воде; примером подобной конструкции может служить японский робот ACM-R5[32][33].
- Роботы, перемещающиеся по вертикальным поверхностям. При проектировании подобных роботов используются различные подходы. Первый подход — проектирование роботов, перемещающихся подобно человеку, взбирающемуся на стену, покрытую выступами. Примером подобной конструкции может служить разработанный в Стэнфордском университете робот Capuchin[34]. Другой подход — проектирование роботов, перемещающихся подобно гекконам. Примерами подобных роботов являются Wallbot[35] и Stickybot[36].
- Плавающие роботы. Существует много разработок роботов перемещающихся в воде подражая движениям рыб. По некоторым подсчетам эффективность подобного движения может на 80 % превосходить эффективность движения с использованием гребного винта[37]. Кроме того, подобные конструкции производят меньше шума, а также отличаются повышенной манёвренностью. Это является причиной высокого интереса исследователей к роботам, движущимся подобно рыбам[38]. Примерами подобных роботов являются разработанный в Эссекском университете робот Robotic Fish[39] и робот Tuna разработанный Institute of Field Robotics (англ.) для исследования и моделирования способа движения, характерного для тунца. Так же, существуют разработки плавающих роботов других конструкций[40]. Примерами являются роботы компании Festo: Aqua Ray имитирующий движения ската и Aqua Jelly, имитирующий движение медузы.
Системы управления
По типу управления робототехнические системы подразделяются на:
- Биотехнические:
- командные (кнопочное и рычажное управление отдельными звеньями робота);
- копирующие (повтор движения человека, возможна реализация обратной связи, передающей прилагаемое усилие, экзоскелеты);
- полуавтоматические (управление одним командным органом, например, рукояткой всей кинематической схемой робота);
- Автоматические:
- программные (функционируют по заранее заданной программе, в основном предназначены для решения однообразных задач в неизменных условиях окружения);
- адаптивные (решают типовые задачи, но адаптируются под условия функционирования);
- интеллектуальные (наиболее развитые автоматические системы);
- Интерактивные:
- автоматизированные (возможно чередование автоматических и биотехнических режимов);
- супервизорные (автоматические системы, в которых человек выполняет только целеуказательные функции);
- диалоговые (робот участвует в диалоге с человеком по выбору стратегии поведения, при этом как правило робот оснащается экспертной системой, способной прогнозировать результаты манипуляций и дающей советы по выбору цели).
В развитии методов управления роботами огромное значение имеет развитие технической кибернетики и теории автоматического управления.
Образование
Робототехнические комплексы также популярны в области образования как современные высокотехнологичные исследовательские инструменты в области теории автоматического управления и мехатроники. Их использование в различных учебных заведениях среднего и высшего профессионального образования позволяет реализовывать концепцию «обучение на проектах», положенную в основу такой крупной совместной образовательной программы США и Европейского союза, как ILERT. Применение возможностей робототехнических комплексов в инженерном образовании дает возможность одновременной отработки профессиональных навыков сразу по нескольким смежным дисциплинам: механика, теория управления, схемотехника, программирование, теория информации. Востребованность комплексных знаний способствует развитию связей между исследовательскими коллективами. Кроме того студенты уже в процессе профильной подготовки сталкиваются с необходимостью решать реальные практические задачи.
Существующие робототехнические комплексы для учебных лабораторий:
- Mechatronics Control Kit
- Festo Didactic
- LEGO Mindstorms
- fischertechnik.
См. также
Типы роботов:
Примечания
- ↑ Air Muscles from Image Company
- ↑ Air Muscles from Shadow Robot
- ↑ T.O.B.B. Mtoussaint.de. Архивировано из первоисточника 24 августа 2011. Проверено 27 ноября 2010.
- ↑ nBot, a two wheel balancing robot. Geology.heroy.smu.edu. Архивировано из первоисточника 24 августа 2011. Проверено 27 ноября 2010.
- ↑ ROBONAUT Activity Report. NASA (февраль 2004). Архивировано из первоисточника 20 августа 2007. Проверено 20 октября 2007.
- ↑ IEEE Spectrum: A Robot That Balances on a Ball. Spectrum.ieee.org. Архивировано из первоисточника 24 августа 2011. Проверено 27 ноября 2010.
- ↑ Rezero – Focus Project Ballbot. ethz.ch. Архивировано из первоисточника 4 февраля 2012. Проверено 11 декабря 2011.
- ↑ Carnegie Mellon (2006-08-09). Carnegie Mellon Researchers Develop New Type of Mobile Robot That Balances and Moves on a Ball Instead of Legs or Wheels. Пресс-релиз. Проверено 2007-10-20.
- ↑ Spherical Robot Can Climb Over Obstacles. BotJunkie. Архивировано из первоисточника 24 августа 2011. Проверено 27 ноября 2010.
- ↑ Rotundus. Rotundus.se. Архивировано из первоисточника 24 августа 2011. Проверено 27 ноября 2010.
- ↑ OrbSwarm Gets A Brain. BotJunkie (11 июля 2007). Архивировано из первоисточника 24 августа 2011. Проверено 27 ноября 2010.
- ↑ Rolling Orbital Bluetooth Operated Thing. BotJunkie. Архивировано из первоисточника 24 августа 2011. Проверено 27 ноября 2010.
- ↑ Swarm. Orbswarm.com. Архивировано из первоисточника 24 августа 2011. Проверено 27 ноября 2010.
- ↑ The Ball Bot : Johnnytronic@Sun. Blogs.sun.com. Архивировано из первоисточника 24 августа 2011. Проверено 27 ноября 2010.
- ↑ Senior Design Projects | College of Engineering & Applied Science| University of Colorado at Boulder. Engineering.colorado.edu (30 апреля 2008). Архивировано из первоисточника 24 августа 2011. Проверено 27 ноября 2010.
- ↑ JPL Robotics: System: Commercial Rovers
- ↑ Multipod robots easy to construct
- ↑ AMRU-5 hexapod robot
- ↑ Achieving Stable Walking. Honda Worldwide. Архивировано из первоисточника 24 августа 2011. Проверено 22 октября 2007.
- ↑ Funny Walk. Pooter Geek (28 декабря 2004). Архивировано из первоисточника 24 августа 2011. Проверено 22 октября 2007.
- ↑ ASIMO's Pimp Shuffle. Popular Science (9 января 2007). Архивировано из первоисточника 24 августа 2011. Проверено 22 октября 2007.
- ↑ Vtec Forum: A drunk robot? thread
- ↑ 3D One-Leg Hopper (1983–1984). MIT Leg Laboratory. Архивировано из первоисточника 24 августа 2011. Проверено 22 октября 2007.
- ↑ 3D Biped (1989–1995). MIT Leg Laboratory. Архивировано из первоисточника 24 августа 2011.
- ↑ Quadruped (1984–1987). MIT Leg Laboratory. Архивировано из первоисточника 24 августа 2011.
- ↑ Testing the Limits. Boeing. Архивировано из первоисточника 24 августа 2011. Проверено 9 апреля 2008.
- ↑ Air Penguin — роботы пингвины на выставке в Ганновере
- ↑ Информация о Air Penguin на сайте компании Festo
- ↑ Air-Ray Ballonet, англ.
- ↑ Описание AirJelly на сайте компании Festo, англ.
- ↑ Miller, Gavin Introduction. snakerobots.com. Архивировано из первоисточника 24 августа 2011. Проверено 22 октября 2007.
- ↑ ACM-R5
- ↑ Swimming snake robot (commentary in Japanese)
- ↑ Capuchin at YouTube
- ↑ Wallbot at YouTube
- ↑ Stanford University: Stickybot
- ↑ Sfakiotakis, et al. (1999-04). «Review of Fish Swimming Modes for Aquatic Locomotion» (PDF) (IEEE Journal of Oceanic Engineering). Проверено 2007-10-24.
- ↑ Richard Mason What is the market for robot fish?. Архивировано из первоисточника 24 августа 2011.
- ↑ Robotic fish powered by Gumstix PC and PIC. Human Centred Robotics Group at Essex University. Архивировано из первоисточника 24 августа 2011. Проверено 25 октября 2007.
- ↑ Witoon Juwarahawong Fish Robot. Institute of Field Robotics. Архивировано из первоисточника 4 ноября 2007. Проверено 25 октября 2007.
Ссылки
- ROBOmaniac.com.ua — Новости робототехники
- Microsoft Robotics Studio — робототехника для всех
- TehPlaneta.ru — Новости робототехники
- Исследователи научили Linux-робота складывать полотенца

Для улучшения этой статьи желательно?: - Исправить статью согласно стилистическим правилам Википедии.
- Найти и оформить в виде сносок ссылки на авторитетные источники, подтверждающие написанное.
Робототехника Основные статьи Робот • Мехатроника Типы роботов Промышленный робот • Сельскохозяйственный робот • Бытовой робот (робот-пылесос) • Боевой робот • Андроид (гиноид) • Персональный робот • Социальный робот • БПЛА • Планетоход • Наноробот Известные роботы ASIMO • AIBO • Roomba • Pleo • Aiko • PackBot • BigDog • QRIO • TOPIO • HRP Связанные термины Групповая робототехника • Устройство телеприсутствия • Киборг • Шагоход • Мех (бронетехника) Категории:- Робототехника
- Айзек Азимов


Wikimedia Foundation. 2010.